応用情報技術者試験 過去問 2015年(平成27年) 春期 午後 問7
自動車用衝突被害軽減ブレーキシステム
G社は、自動車用衝突被害軽減ブレーキシステム(以下、自動ブレーキという)を開発している。自動ブレーキ装着車両は、車体の前部に設置されているミリ波レーダ装置(以下、レーダという)によって、前を走行している車両との距離を測定し、衝突のおそれがあるときにブレーキ操作を行う。
自動ブレーキの動作環境を、図1に示す。

自動ブレーキの構成と動作
自動ブレーキの構成を、図2に示す。

自動ブレーキの処理手順は次のとおりである。
① 自動ブレーキ制御部(以下、制御部という)は、20ミリ秒周期でレーダに測定開始信号を出力する。
② レーダは、測定開始信号が入力されると、前を走行している車両との距離測定を開始し、10ミリ秒後に測定完了信号と距離データを制御部に出力する。
③ 制御部は、測定完了信号が入力されると、距離データを0.01m単位で読み取り、相対速度を算出する。相対速度s(m/秒)は、前回測定した距離d1(m)、今回測定した距離d2(m)及び経過時間(20ミリ秒)を用いて、次の式で計算することができる。
s = (d1-d2)/a
④ 制御部は、衝突までの予測時間(以下、予測時間という)を算出する。予測時間t(秒)は、次の式で計算することができる。
t = b/c
⑤ 制御部は、算出した予測時間によって次の処理を行う。
- 予測時間が0秒以上3秒未満のとき、制御部は警告信号を出力し、表示パネルに警告表示を行わせる。
- 予測時間が0秒以上1.5秒未満のとき、制御部は緊急ブレーキ信号を出力して、ブレーキを作動させる。
制御部の構成とタイマ割込みソフトウェア
制御部のMCUブロック図を、図3に示す。
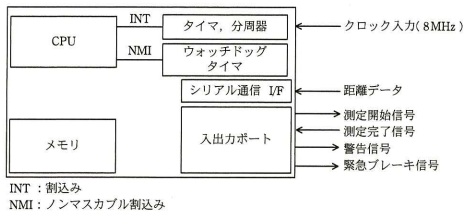
MCUは、クロック入力を8分周したクロックで内蔵されたタイマをダウンカウントし、カウント値が0になるとCPUに割込みを発生させる。タイマ割込みソフトウェアは、次の割込みが20ミリ秒後に発生するようにタイマのカウント値を設定する。
タイマ割込みソフトウェアのフロー図を、図4に示す。
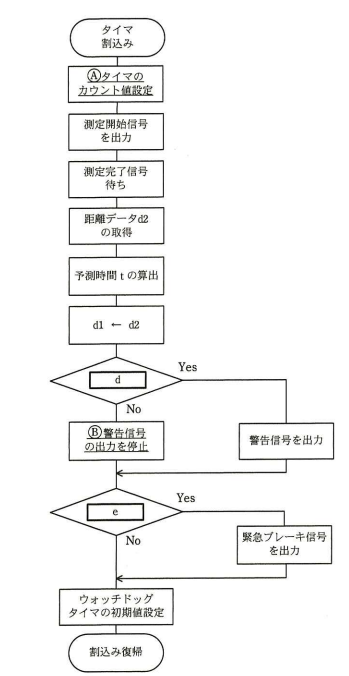
自動ブレーキには安全設計が求められるので、ウォッチドッグタイマを使って、タイマ割込みソフトウェアが動作しているかを周期的に監視する。